



4. Kjerneprogramvarefunksjoner i BMS
l Målefunksjon
(1) Grunnleggende informasjonsmåling: overvåking av batterispenning, strømsignal og batteripakketemperatur. Den mest grunnleggende funksjonen til batteristyringssystemet er å måle spenning, strøm og temperatur i battericellene, som er grunnlaget for alle toppnivåberegninger og kontrolllogikk i batteristyringssystemet.
(2) Isolasjonsmotstandsdeteksjon: Hele batterisystemet og høyspenningssystemet må isolasjonstestes av batteristyringssystemet.
(3) Høyspenningssperredeteksjon (HVIL): brukes til å bekrefte integriteten til hele høyspenningssystemet. Når integriteten til høyspenningskretsen er skadet, aktiveres sikkerhetstiltak.
lEstimeringsfunksjon
(1) SOC- og SOH-estimering: kjernen og den vanskeligste delen
(2) Balansering: Juster SOC x kapasitetsubalansen mellom monomerer gjennom en balanseringskrets.
(3) Batteristrømbegrensning: Batteriets inngangs- og utgangseffekt er begrenset ved forskjellige SOC-temperaturer.
lAndre funksjoner
(1) Relékontroll: inkludert hoved +, hoved-, laderelé +, laderelé -, forladerelé
(2) Termisk kontroll
(3) Kommunikasjonsfunksjon
(4) Feildiagnose og alarm
(5) Feiltolerant drift
5.Kjerneprogramvarefunksjoner i BMS
lMålefunksjon
(1) Grunnleggende informasjonsmåling: overvåking av batterispenning, strømsignal og batteripakketemperatur. Den mest grunnleggende funksjonen til batteristyringssystemet er å måle spenning, strøm og temperatur i battericellene, som er grunnlaget for alle toppnivåberegninger og kontrolllogikk i batteristyringssystemet.
(2) Isolasjonsmotstandsdeteksjon: Hele batterisystemet og høyspenningssystemet må isolasjonstestes av batteristyringssystemet.
(3) Høyspenningssperredeteksjon (HVIL): brukes til å bekrefte integriteten til hele høyspenningssystemet. Når integriteten til høyspenningskretsen er skadet, aktiveres sikkerhetstiltak.
lEstimeringsfunksjon
(1) SOC- og SOH-estimering: kjernen og den vanskeligste delen
(2) Balansering: Juster SOC x kapasitetsubalansen mellom monomerer gjennom en balanseringskrets.
(3) Batteristrømbegrensning: Batteriets inngangs- og utgangseffekt er begrenset ved forskjellige SOC-temperaturer.
lAndre funksjoner
(1) Relékontroll: inkludert hoved +, hoved-, laderelé +, laderelé -, forladerelé
(2) Termisk kontroll
(3) Kommunikasjonsfunksjon
(4) Feildiagnose og alarm
(5) Feiltolerant drift
6.BMS-programvarearkitektur
lHøy- og lavspenningsstyring
Når den normalt er slått på, vekkes BMS av VCU via et fast linje- eller CAN-signal på 12 V. Etter at BMS har fullført selvtesten og gått inn i standby, sender VCU en høyspenningskommando, og BMS kontrollerer lukkingen av reléet for å fullføre høyspenningstilkoblingen. Når den er slått av, sender VCU en lavspenningskommando og kobler deretter fra 12 V-vekkingen. Når pistolen settes inn for lading i avslått tilstand, kan den vekkes av CP- eller A+-signalet.
lLadehåndtering
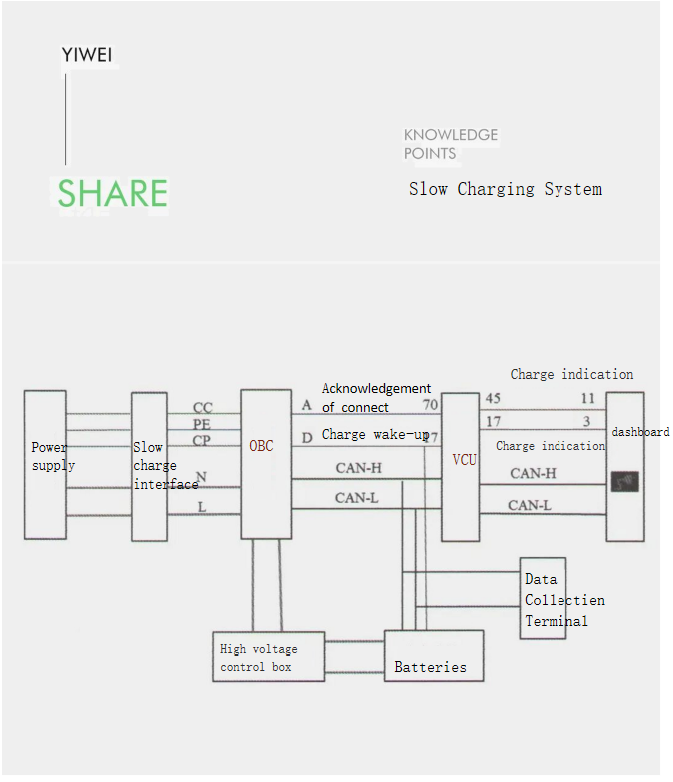
(1) Langsom lading
Langsom lading er å lade batteriet med likestrøm konvertert fra vekselstrøm av den innebygde laderen på ladestaven (eller 220V strømforsyning). Ladestavens spesifikasjoner er vanligvis 16A, 32A og 64A, og den kan også lades via en husholdningsstrømforsyning. BMS-en kan vekkes av CC- eller CP-signalet, men det bør sørges for at den kan sove normalt etter at ladingen er fullført. AC-ladeprosessen er relativt enkel og kan utvikles i samsvar med detaljerte nasjonale standarder.
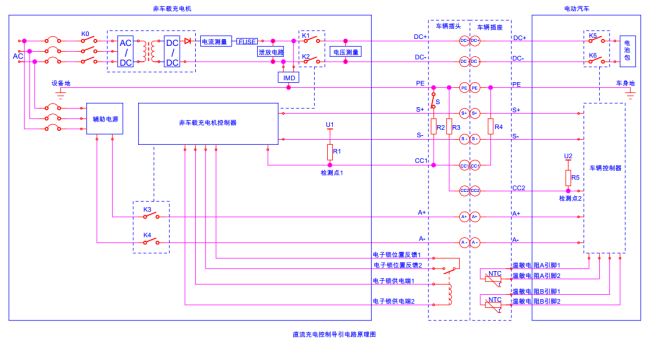
(2) Hurtiglading
Hurtiglading er å lade batteriet med likestrøm fra DC-ladestaven, noe som kan oppnå en ladehastighet på 1C eller enda høyere. Vanligvis kan 80 % av batteriet lades på 45 minutter. Det kan vekkes av ladestavens A+ signal fra hjelpestrømkilden.
lEstimeringsfunksjon
(1) SOP (State of Power) henter hovedsakelig batteriets tilgjengelige lade- og utladeeffekt ved å slå opp tabeller via temperatur og SOC. VCU-en bestemmer hvordan hele kjøretøyet brukes basert på den sendte effektverdien.
(2) SOH (State of Health) karakteriserer hovedsakelig batteriets nåværende helsetilstand, med en verdi mellom 0–100 %. Det er generelt antatt at batteriet ikke kan brukes etter at det har falt under 80 %.
(3) SOC (State of Charge) tilhører kjernekontrollalgoritmen til BMS, som karakteriserer gjeldende gjenværende kapasitetsstatus. Den er hovedsakelig basert på ampere-time-integralmetoden og EKF-algoritmen (utvidet Kalman-filter), kombinert med korreksjonsstrategier (som korreksjon av åpen kretsspenning, korreksjon av full lading, korreksjon ved slutt på lading, kapasitetskorreksjon under forskjellige temperaturer og SOH, osv.).
(4) SOE (State of Energy)-algoritmen er ikke mye utviklet av innenlandske produsenter, eller den bruker relativt enkle algoritmer for å finne forholdet mellom gjenværende energi under gjeldende tilstand og maksimal tilgjengelig energi. Denne funksjonen brukes hovedsakelig til å estimere gjenværende marsjrekkevidde.
lFeildiagnose
Ulike feilnivåer skilles ut i henhold til batteriets ulik ytelse, og ulike behandlingstiltak iverksettes av BMS og VCU under ulike feilnivåer, for eksempel advarsler, strømbegrensning eller direkte frakobling av høyspenning. Feil inkluderer datainnsamlings- og rasjonalitetsfeil, elektriske feil (sensorer og aktuatorer), kommunikasjonsfeil og batteristatusfeil, osv.
1.Kjerneprogramvarefunksjoner i BMS
lMålefunksjon
(1) Grunnleggende informasjonsmåling: overvåking av batterispenning, strømsignal og batteripakketemperatur. Den mest grunnleggende funksjonen til batteristyringssystemet er å måle spenning, strøm og temperatur i battericellene, som er grunnlaget for alle toppnivåberegninger og kontrolllogikk i batteristyringssystemet.
(2) Isolasjonsmotstandsdeteksjon: Hele batterisystemet og høyspenningssystemet må isolasjonstestes av batteristyringssystemet.
(3) Høyspenningssperredeteksjon (HVIL): brukes til å bekrefte integriteten til hele høyspenningssystemet. Når integriteten til høyspenningskretsen er skadet, aktiveres sikkerhetstiltak.
lEstimeringsfunksjon
(1) SOC- og SOH-estimering: kjernen og den vanskeligste delen
(2) Balansering: Juster SOC x kapasitetsubalansen mellom monomerer gjennom en balanseringskrets.
(3) Batteristrømbegrensning: Batteriets inngangs- og utgangseffekt er begrenset ved forskjellige SOC-temperaturer.
lAndre funksjoner
(1) Relékontroll: inkludert hoved +, hoved-, laderelé +, laderelé -, forladerelé
(2) Termisk kontroll
(3) Kommunikasjonsfunksjon
(4) Feildiagnose og alarm
(5) Feiltolerant drift
2.BMS-programvarearkitektur
lHøy- og lavspenningsstyring
Når den normalt er slått på, vekkes BMS av VCU via et fast linje- eller CAN-signal på 12 V. Etter at BMS har fullført selvtesten og gått inn i standby, sender VCU en høyspenningskommando, og BMS kontrollerer lukkingen av reléet for å fullføre høyspenningstilkoblingen. Når den er slått av, sender VCU en lavspenningskommando og kobler deretter fra 12 V-vekkingen. Når pistolen settes inn for lading i avslått tilstand, kan den vekkes av CP- eller A+-signalet.
lLadehåndtering
(1) Langsom lading
Langsom lading er å lade batteriet med likestrøm konvertert fra vekselstrøm av den innebygde laderen på ladestaven (eller 220V strømforsyning). Ladestavens spesifikasjoner er vanligvis 16A, 32A og 64A, og den kan også lades via en husholdningsstrømforsyning. BMS-en kan vekkes av CC- eller CP-signalet, men det bør sørges for at den kan sove normalt etter at ladingen er fullført. AC-ladeprosessen er relativt enkel og kan utvikles i samsvar med detaljerte nasjonale standarder.
(2) Hurtiglading
Hurtiglading er å lade batteriet med likestrøm fra DC-ladestaven, noe som kan oppnå en ladehastighet på 1C eller enda høyere. Vanligvis kan 80 % av batteriet lades på 45 minutter. Det kan vekkes av ladestavens A+ signal fra hjelpestrømkilden.
lEstimeringsfunksjon
(1) SOP (State of Power) henter hovedsakelig batteriets tilgjengelige lade- og utladeeffekt ved å slå opp tabeller via temperatur og SOC. VCU-en bestemmer hvordan hele kjøretøyet brukes basert på den sendte effektverdien.
(2) SOH (State of Health) karakteriserer hovedsakelig batteriets nåværende helsetilstand, med en verdi mellom 0–100 %. Det er generelt antatt at batteriet ikke kan brukes etter at det har falt under 80 %.
(3) SOC (State of Charge) tilhører kjernekontrollalgoritmen til BMS, som karakteriserer gjeldende gjenværende kapasitetsstatus. Den er hovedsakelig basert på ampere-time-integralmetoden og EKF-algoritmen (utvidet Kalman-filter), kombinert med korreksjonsstrategier (som korreksjon av åpen kretsspenning, korreksjon av full lading, korreksjon ved slutt på lading, kapasitetskorreksjon under forskjellige temperaturer og SOH, osv.).
(4) SOE (State of Energy)-algoritmen er ikke mye utviklet av innenlandske produsenter, eller den bruker relativt enkle algoritmer for å finne forholdet mellom gjenværende energi under gjeldende tilstand og maksimal tilgjengelig energi. Denne funksjonen brukes hovedsakelig til å estimere gjenværende marsjrekkevidde.
lFeildiagnose
Ulike feilnivåer skilles ut i henhold til batteriets ulik ytelse, og ulike behandlingstiltak iverksettes av BMS og VCU under ulike feilnivåer, for eksempel advarsler, strømbegrensning eller direkte frakobling av høyspenning. Feil inkluderer datainnsamlings- og rasjonalitetsfeil, elektriske feil (sensorer og aktuatorer), kommunikasjonsfeil og batteristatusfeil, osv.
Kontakt oss:
yanjing@1vtruck.com +(86)13921093681
duanqianyun@1vtruck.com +(86)13060058315
liyan@1vtruck.com +(86)18200390258
Publiseringstid: 12. mai 2023



